ReachingCtrl aims at reaching a given state with the robot. More...
#include <reach.hpp>
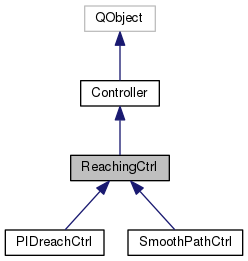
Inheritance diagram for ReachingCtrl:
Public Member Functions | |
| virtual void | changeGoal (const State &goal) |
| Change the oriented point which is aimed. More... | |
| const State & | getGoal () const |
| Get the state which is aimed. More... | |
| ReachingCtrl (const MotionModel &model, const double &ts, const State &goal_aimed) | |
| The constructor needs a motion model, a time step and a goal state (in the robot's frame). More... | |
 Public Member Functions inherited from Controller Public Member Functions inherited from Controller | |
| virtual void | chooseVelocities (double &trans_vel, double &rot_vel, std::ostream &log_str)=0 |
| Computes new velocities for ROS node. More... | |
| void | stopMotion () |
| Stops the robot (i.e. sets both velocities to zero). More... | |
| const double & | timeStep () const |
| Stops the robot (i.e. sets both velocities to zero). More... | |
| virtual | ~Controller () |
| The destructor needs to be defined as virtual. More... | |
Protected Member Functions | |
| void | newState (const State &state) |
| Handles new state of the robot. More... | |
| virtual void | setGoal (const State &new_goal) |
| Set the state which is aimed. More... | |
| Protected Member Functions inherited from Controller | |
| void | changeFirstOdometry () |
| Change the odometry data status (first or not). More... | |
| Controller (const MotionModel &model, const double &ts) | |
| This constructor (for the inheriting controllers) sets the motion model to the given one. More... | |
| bool | firstOdometry () |
| Are the odometry data the first? More... | |
| void | updateVelocities (double &trans_vel, double &rot_vel) |
| Update the velocities from the fields and send the update signal. More... | |
Protected Attributes | |
| State | state |
| The state of the robot. More... | |
| Protected Attributes inherited from Controller | |
| double | initial_date |
| The first date of the odometry. More... | |
| const MotionModel & | motion_model |
| The model of the motion. More... | |
| double | moving_velocity |
| Translation velocity desired for the robot. More... | |
| const double | time_step |
| The time step of the controller. More... | |
| double | turning_velocity |
| Rotation velocity desired for the robot. More... | |
Private Attributes | |
| State | goal |
| The state which is aimed. More... | |
Additional Inherited Members | |
| Signals inherited from Controller | |
| void | commandsUpdated (const double &trans_vel, const double &rot_vel) |
| Update the display of the controller's commands. More... | |
| void | stateUpdated (const State &state) |
| Update the display of the state. More... | |
Detailed Description
ReachingCtrl aims at reaching a given state with the robot.
The aimed state will be considered to be given in the robot's original frame (defined by the original oriented point, as given by the first odometry data).
- Since
- 0.3.2
Constructor & Destructor Documentation
|
inline |
The constructor needs a motion model, a time step and a goal state (in the robot's frame).
- Parameters
-
model the motion model, ts the time step of the controller, goal_aimed the goal configuration.
Member Function Documentation
|
inlinevirtual |
|
inline |
|
inlineprotectedvirtual |
Handles new state of the robot.
- Parameters
-
state the new state of the robot, from odometry.
This method can be overwritten by inheritors.
Reimplemented from Controller.
|
inlineprotectedvirtual |
Set the state which is aimed.
- Parameters
-
new_goal the new aimed state.
Reimplemented in SmoothPathCtrl.
Member Data Documentation
|
protected |
The documentation for this class was generated from the following file: