This class defines a standard robotic configuration, containing the position of a reference point and the orientation of a main axis. More...
#include <OrPtConfig.hpp>
Public Member Functions | |
| OrPtConfig () | |
| The default constructor should only be used for array initializations: it correspond to a default point with zero orientation. More... | |
| OrPtConfig (const iSeeML::geom::Point &P, const double &theta) | |
| The main constructor. More... | |
| OrPtConfig (const double &x, const double &y, const double &theta) | |
| A usefull constructor. More... | |
| virtual | ~OrPtConfig () |
| The virtual destructor does nothing. | |
| iSeeML::Object & | clone () const |
| Description method, giving a copy of the current configuration. More... | |
| void | writeTo (ostream &O) const |
| Description method, writing the configuration in a given output stream: coordinate in each dimension is written, between paranthesis and separated by commas. More... | |
| const iSeeML::geom::Point & | position () const |
| Description method, giving the position of the robot's reference point in this configuration. More... | |
| const double & | orientation () const |
| Description method, giving the orientation of the robot's main axis in this configuration. More... | |
| iSeeML::geom::Vector | projection (const iSeeML::geom::Point &P) const |
| Gives the projection of a point in the frame of this configuration. More... | |
| OrPtConfig | projection (const OrPtConfig &q) const |
| Projects a configuration in the frame of this configuration. More... | |
| OrPtConfig & | uTurn () |
Modification method, turning the current oriented point to its opposite: the position does not change but the orientation is replaced by its opposite (   is added to it). More... is added to it). More... | |
| bool | operator== (const OrPtConfig &other) const |
| Equality operator between oriented points. More... | |
| void | operator+= (const OrPtConfig &other) |
| Adds an oriente point to the current one: gives the oriented point obtained when the added oriented point is considered in the current's frame. More... | |
| OrPtConfig | operator+ (const OrPtConfig &other) const |
| Addition operator between oriented points: gives the oriented point obtained when the second oriented point is considered in the first's frame. More... | |
| OrPtConfig | opposite () const |
| Various method, giving the opposite oriented point of the current one: the opposite oriented point has the same position but opposite orientation (current oriented point's orientation ). More... | |
| double | distance2 (const OrPtConfig &other) const |
| Various method, giving the distance between two oriented points' positions. More... | |
| bool | isParallelTo (const OrPtConfig &other) const |
Various method, checking whether two oriented points are parallel, ie whether their orientations are equal (modulo 2  ). More... ). More... | |
| bool | isSymmetricTo (const OrPtConfig &other) const |
| Various method, checking whether two oriented points are symmetric, ie whether their orientations are symmetric wrt the line segment connecting their position. More... | |
| bool | isAlignedWith (const OrPtConfig &other) const |
| Various method, checking whether two oriented points are aligned: their orientations should be equal, and be the same as the orientation of the segment connecting their positions. More... | |
| bool | hasInFront (const iSeeML::geom::Point &point) const |
| Various method, checking whether a point is in the front half-plane of the current oriented point: the vector connecting the current oriented point's position to the given point should make an angle between - / 2 and / 2 with the current oriented point's orientation. More... | |
 Public Member Functions inherited from iSeeML::Object Public Member Functions inherited from iSeeML::Object | |
| virtual | ~Object () |
| This virtual class needs a virtual destructor. | |
| virtual const string | className () const |
| Description method, giving the object's class name. More... | |
| bool | sameClass (const iSeeML::Object &other) |
| Method verifying that a given object has the same type (same class name) than the current one. More... | |
Static Public Attributes | |
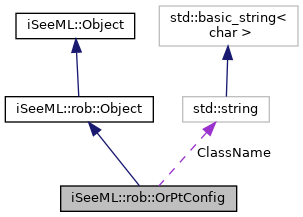
| static const string | ClassName |
| The class name is public, as this class can be instanced. More... | |
Protected Member Functions | |
| int | algDimension () const |
| Description method, giving the dimension of the containing space (3) when this configuration is considered as an algebraic vector. More... | |
| double | algCoord (const int i) const |
| Description method, giving the coordinate of given index of the configuration (both coordinates of the position, then orientation). More... | |
| Protected Member Functions inherited from iSeeML::Object | |
| virtual void | algWriteTo (ostream &O) const |
| Description method for algebraic vectors, writing this vector in a given output stream: coordinates for each dimension are written, between paranthesis and separated by commas. More... | |
Additional Inherited Members | |
| Static Public Member Functions inherited from iSeeML::Object | |
| template<class T > | |
| static const T & | min (const T &a, const T &b) |
| Method giving the minimum of two elements. More... | |
| template<class T > | |
| static const T & | max (const T &a, const T &b) |
| Method giving the maximum of two elements. More... | |
| static double | sqr (const double &x) |
| Method giving the square of a double. More... | |
| static double | mod2pi (const double &theta) |
| Method giving the angle between - (excluded) and (included), which is equal to a given angle modulo 2 . More... | |
| static double | rad2deg (const double &theta) |
Method transforming an angle in radian,  with with  between -1 (excluded) and 1 (included), into its equivalent in degree, i.e. More... between -1 (excluded) and 1 (included), into its equivalent in degree, i.e. More... | |
| static double | deg2rad (const double &theta) |
Method transforming an angle in degree,  with between -1 (excluded) and 1 (included), into its equivalent in radian, i.e. More... with between -1 (excluded) and 1 (included), into its equivalent in radian, i.e. More... | |
| static bool | isPositive (const double &x) |
| Method telling whether a double is strictly positive. More... | |
| static bool | isNegative (const double &x) |
| Method telling whether a double is strictly negative. More... | |
| static bool | isZero (const double &x) |
| Method comparing a double to zero. More... | |
| static int | sign (const double &x) |
| Method giving the sign of a double. More... | |
| Related Functions inherited from iSeeML::Object | |
| ostream & | operator<< (ostream &O, const iSeeML::Object &o) |
| Modification method, writing a description of a ISeeML object in a given output stream. More... | |
Detailed Description
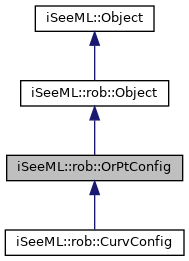
This class defines a standard robotic configuration, containing the position of a reference point and the orientation of a main axis.
This configuration is sufficient to define the position of most robots, and thus is enough for collision avoidance. However, taking into account dynamic constraints (as velocity and acceleration bounds) or more precise kinematic constraints (as continuity of the directing wheels' positions) generally requires a more complex configuration, as e.g. iSeeML::rob::CurvConfig.
This class contains description methods giving position and orientation of a standard configuration as well as the writeTo method, a modification method changing a standard configuration into its opposite, the equality operator, and various methods giving the opposite of a standard configuration, the distance between two standard configurations' positions or whether two such configurations verify some properties (parallelism, symmetry, alignment) or whether a point is in front of a standard configuration.
- Version
- 1.0
- Examples
- Fwd.cpp, LengthFwd.cpp, TimeFwd.cpp, and wxGuiFwd.cpp.
Constructor & Destructor Documentation
◆ OrPtConfig() [1/3]
|
inline |
The default constructor should only be used for array initializations: it correspond to a default point with zero orientation.
- See also
- default constructor of iSeeML::geom::Point.
◆ OrPtConfig() [2/3]
|
inline |
The main constructor.
- Parameters
-
P the position of the reference point, theta the orientation of the main axis, taken between - (excluded) and (included) modulo 2 .
- See also
- iSeeML::Object::mod2pi.
◆ OrPtConfig() [3/3]
|
inline |
A usefull constructor.
- Parameters
-
x the first coordinate of the reference point, y the second coordinate of the reference point, theta the orientation of the main axis, taken between - (excluded) and (included) modulo 2 .
- See also
- main constructor of iSeeML::geom::Point, iSeeML::Object::mod2pi.
Member Function Documentation
◆ algCoord()
|
inlineprotectedvirtual |
Description method, giving the coordinate of given index of the configuration (both coordinates of the position, then orientation).
- Parameters
-
i the index of the searched coordinate.
- Precondition
- the parameter is an index, and should be equal to one, two or three. If not, and
ISEEML_CHECK_ORPT_CONFIG_PRECONDis defined (see CompilerFlags.h), an error is generated.
- Returns
- the double coordinate associated to the index if this one is between 1 and dimension, or 0.
Reimplemented from iSeeML::Object.
◆ algDimension()
|
inlineprotectedvirtual |
Description method, giving the dimension of the containing space (3) when this configuration is considered as an algebraic vector.
This representation is mainly used to define a unified writeTo. Dimension cannot be static, as it is virtual.
Reimplemented from iSeeML::Object.
◆ clone()
|
inlinevirtual |
Description method, giving a copy of the current configuration.
This clone is dynamically allocated (using default copy constructor), it has to be deleted later.
- Returns
- a copy/clone of the current configuration.
Implements iSeeML::Object.
◆ distance2()
|
inline |
Various method, giving the distance between two oriented points' positions.
Note : this is the standard 2-dimensional plane distance, instead of being a distance in the 3-dimensional space of the oriented points. Its name comes from this fact.
- Parameters
-
other another oriented point.
- Returns
- the distance between the oriented points' positions.
- See also
- position, iSeeML::geom::Point::distance.
◆ hasInFront()
|
inline |
Various method, checking whether a point is in the front half-plane of the current oriented point: the vector connecting the current oriented point's position to the given point should make an angle between - / 2 and / 2 with the current oriented point's orientation.
The vector going from the oriented point's position to the point and the vector of same orientation as the oriented point should have a positive scalar product.
- Parameters
-
point a point.
- Returns
- whether the given point is in the front half-plane of the current oriented point.
- See also
- position, orientation, iSeeML::geom::Point::operator-, iSeeML::geom::Vector::operator*(const Vector&).
◆ isAlignedWith()
|
inline |
Various method, checking whether two oriented points are aligned: their orientations should be equal, and be the same as the orientation of the segment connecting their positions.
In fact, the oriented points are aligned iff they are simultaneously parallel and symmetric.
- Parameters
-
other another oriented point.
- Returns
- whether the current oriented point and the given one are aligned.
- See also
- isParallelTo, isSymmetricTo.
◆ isParallelTo()
|
inline |
Various method, checking whether two oriented points are parallel, ie whether their orientations are equal (modulo 2 ).
- Parameters
-
other another oriented point.
- Returns
- whether the current oriented point and the given one have same orientation.
◆ isSymmetricTo()
|
inline |
Various method, checking whether two oriented points are symmetric, ie whether their orientations are symmetric wrt the line segment connecting their position.
The vector connecting the positions and the vector of average orientation should be collinear: their vectorial product should be zero.
- Parameters
-
other another oriented point.
- Returns
- whether the current oriented point and the given one are symmetric.
- See also
- position, orientation, iSeeML::geom::Vector::operator^, iSeeML::Object::isZero.
◆ operator+()
|
inline |
Addition operator between oriented points: gives the oriented point obtained when the second oriented point is considered in the first's frame.
If R = P + Q, Q = P.projection(R).
- Parameters
-
other the second oriented point.
- Returns
- the oriented point whose projection in the first oriented point's frame is the second oriented point.
- See also
- OrPtConfig projection(const OrPtConfig&).
◆ operator+=()
|
inline |
Adds an oriente point to the current one: gives the oriented point obtained when the added oriented point is considered in the current's frame.
If R = P + Q, Q = P.projection(R).
- Parameters
-
other the second oriented point.
- See also
- operator+.
◆ operator==()
|
inline |
Equality operator between oriented points.
- Parameters
-
other another oriented point.
- Returns
- whether the two points are equal (same position and orientation).
- See also
- position, iSeeML::geom::Point::operator==, isParallelTo.
◆ opposite()
|
inline |
Various method, giving the opposite oriented point of the current one: the opposite oriented point has the same position but opposite orientation (current oriented point's orientation ).
- Returns
- the opposite oriented point of the current one.
- See also
- uTurn.
◆ orientation()
|
inline |
Description method, giving the orientation of the robot's main axis in this configuration.
- Returns
- the orientation of the main axis.
- Examples
- wxGuiFwd.cpp.
◆ position()
|
inline |
Description method, giving the position of the robot's reference point in this configuration.
- Returns
- the position of the reference point.
- Examples
- wxGuiFwd.cpp.
◆ projection() [1/2]
|
inline |
Gives the projection of a point in the frame of this configuration.
- Parameters
-
P the point projected into this configuration's frame.
- Returns
- the vector from the origin to the projected point.
- See also
- iSeeML::geom::Point::operator-(const iSeeML::geom::Point&), iSeeML::geom::Vector::rotate, position, orientation.
◆ projection() [2/2]
|
inline |
Projects a configuration in the frame of
this configuration.
If R = P.projection(Q), then Q = P + R.
- Parameters
-
q the configuration projected into this configuration's frame.
- Returns
- the new configuration, once projected.
- See also
- OrPtConfig(const iSeeML::geom::Point&, const double&), position, projection(const iSeeML::geom::Point&), orientation, operator+.
◆ uTurn()
|
inline |
Modification method, turning the current oriented point to its opposite: the position does not change but the orientation is replaced by its opposite ( is added to it).
- Returns
- the new oriented point, one transformed to its opposite.
◆ writeTo()
|
inlinevirtual |
Description method, writing the configuration in a given output stream: coordinate in each dimension is written, between paranthesis and separated by commas.
- Parameters
-
O the output stream in which description is written.
- See also
- algWriteTo.
Implements iSeeML::Object.
Member Data Documentation
◆ ClassName
|
static |
The class name is public, as this class can be instanced.
- See also
- className.
The documentation for this class was generated from the following file:
- /mnt/data/ajs/Loria/Compte/Recherche/Prog/C++/ISeeML/include/iSeeML/rob/OrPtConfig.hpp
